Realisatie aandrijving en besturing van getijdensimulator Universiteit Utrecht
Met de recente overstromingen in diverse gebieden in Europa is de getijdensimulator van de Universiteit Utrecht relevanter dan ooit. Hoogleraar Maarten Kleinhans had de wens om de werking van de getijdenstroom en de vorming van de lage landen op schaal zo goed mogelijk na te bootsen. Daarvoor werd een twintig bij drie meter lange goot geconstrueerd die elke halve minuut op en neer beweegt. Dit kantelprincipe zorgt ervoor dat er in enkele dagen al prachtige Waddenzee-achtige bekkens en riviermondingen ontstaan in een proefopstelling met zand. Met dit grote onderzoeksinstrument beoogt Maarten te simuleren hoe riviermondingen worden gevormd. Deze ondiepe kustwateren worden gevormd door de toevoer van rivierwater en getijdenstromen met zand en slib, en zijn broedplaatsen voor schelpdieren en vissen, en dus van grote ecologische waarde. De meeste grote havens ter wereld liggen ook in riviermondingen, dus het is cruciaal dat ze bevaarbaar blijven, niet verzanden en niet overstromen. Recent zijn er levende zaailingen verspreid om ook de effecten van plantengroei op de schorren, of kwelders, en de overstromingsvlakte op schaal na te bootsen.
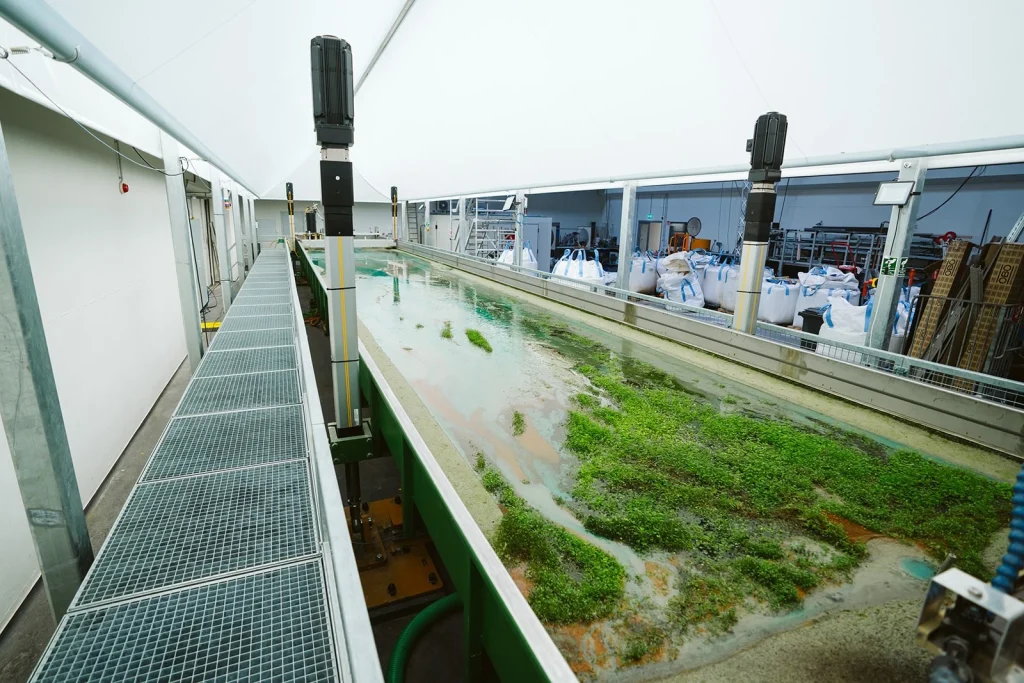
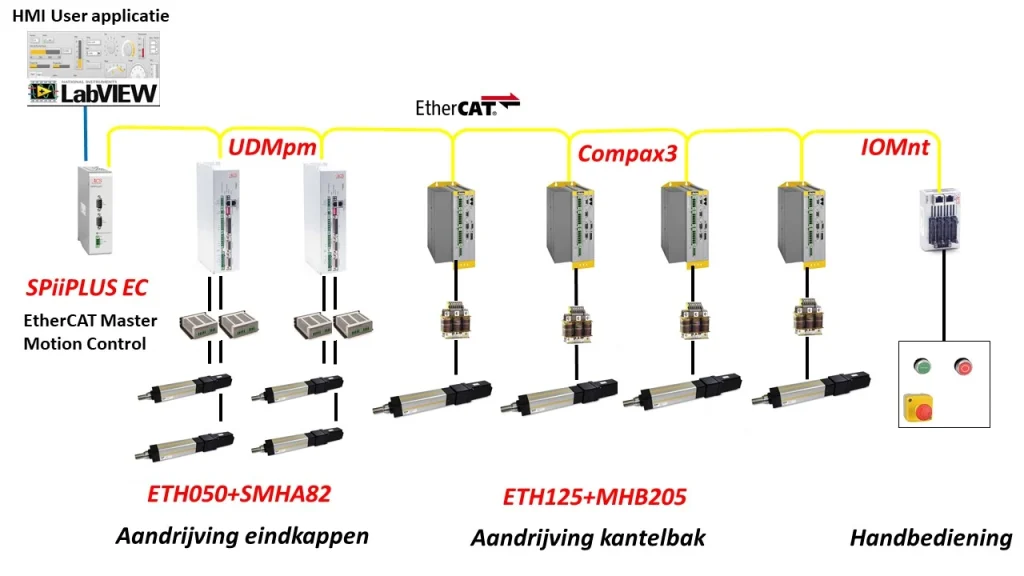
Het aandrijven van de metronoom, waarmee het getijde en de golven worden gesimuleerd, is gerealiseerd met een elektrisch aandrijfconcept van VARIODRIVE. De aandrijving van de Metronoom bestaat uit twee delen. de Metronoom heeft een scharnierpunt in het midden waarmee de bak kan kantelen. De hoofdaandrijving die de kantelbeweging van de bak realiseert bestaat uit vier Parker ETH125 kogelomloop cilinders met een slaglengte van elk één meter met daaraan een Apex AB142 Gearbox met Parker MHB205 motor. Elke motor met kogelomloop cilinder wordt aangestuurd door de Parker Compax3 servoregelaar. Om zo weinig mogelijk energie verloren te laten gaan, zitten de DC bussen van de Compax3 servoregelaars aan elkaar gekoppeld.
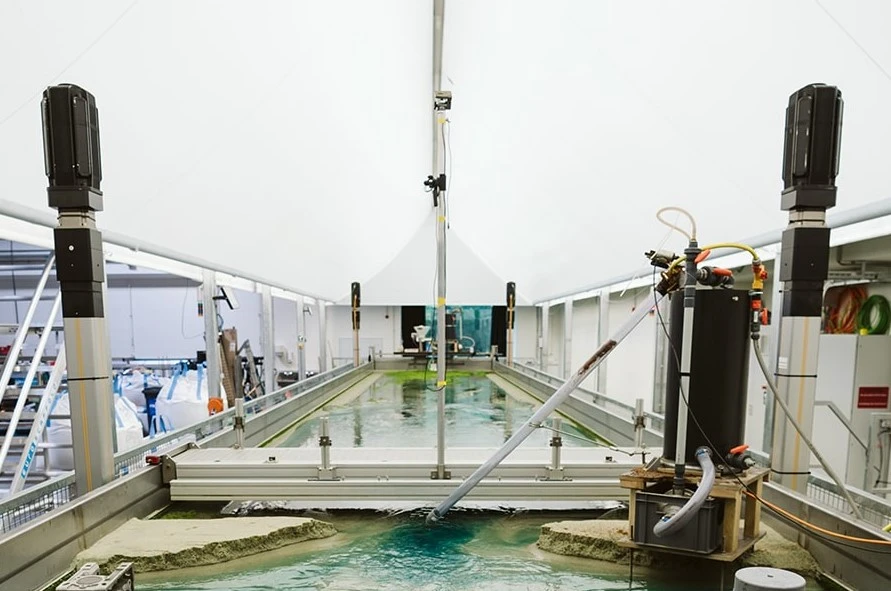
De uiteinden van de Metronoom, waarmee de waterstand in de instromende rivier en de zee wordt geregeld, zijn voorzien van overlaten voor het water die op en neer kunnen bewegen. Deze worden aangedreven door vier Parker ETH050 kogelomloop cilinders met daaraan een Apex AB060 gearbox met Parker SMHA82 motor. Deze motoren worden aangestuurd door de ACS UDMpm servoregelaar. Dit is een twee-assige servoregelaar die gebruik maakt van dezelfde DC bus waardoor ook hier geen energie verloren gaat. Uiteindelijk is voor deze elektrische oplossing gekozen omdat dit een efficiëntere manier van aandrijven is ten opzichte van een hydraulische oplossing en tevens een milieuvriendelijkere oplossing.
Om alle bewegingen uit te voeren is gekozen voor de ACS EC motion controller. Een krachtige motion controller die alle gewenste bewegingsprofielen kan uitvoeren. De bewegingsprofielen worden door de Universiteit Utrecht in Labview voorbereid en gesimuleerd. Wanneer de simulatie naar wens ingesteld is, worden de bewegingen via ethernet in de ACS motion controller geladen. Vervolgens wordt de beweging gestart vanuit Labview en ook gemonitord gedurende de experimenten. De industriële camera’s die boven de Metronoom hangen worden voortdurend getriggered op een vaste fase van de kantelbeweging. De datalogging van alle signalen worden vanuit de ACS naar de Labview PC gestuurd zodat de Universiteit Utrecht deze kan analyseren. Alle aandrijvingen zijn voorzien van multiturn absoluut encoders waardoor alle posities altijd onthouden worden ook na spanningsuitval. Het experiment kan op elke positie gestopt, pauzeert en herstart worden. De aandrijving van de Metronoom laat zien dat VARIODRIVE met de combinatie van Parker, ACS en Apex tot een totaal oplossing is gekomen die alles kan wat de Universiteit Utrecht verwacht.
Meer weten over de metronoom?
Kijk dan op de website van de Universiteit Utrecht
Nieuwsgierig naar de wetenschap hierachter?
Lees dan het artikel Proof Of Principle
Of wil je nog meer beeldmateriaal zien?
Bekijk hier meer korte video’s en bijbehorende publicaties